Appearance
其他配置
原点
【原点】界面内包含机器人的常用位姿,用户可以在此对自定义原点位姿进行设置,也可以将机器人快速运动到常用位姿。
- 机器人:仿真当前机器人状态。
- 原点:查看当前 “原点” 的位姿参数,设置常用位姿或控制机器人运动到常用位姿。
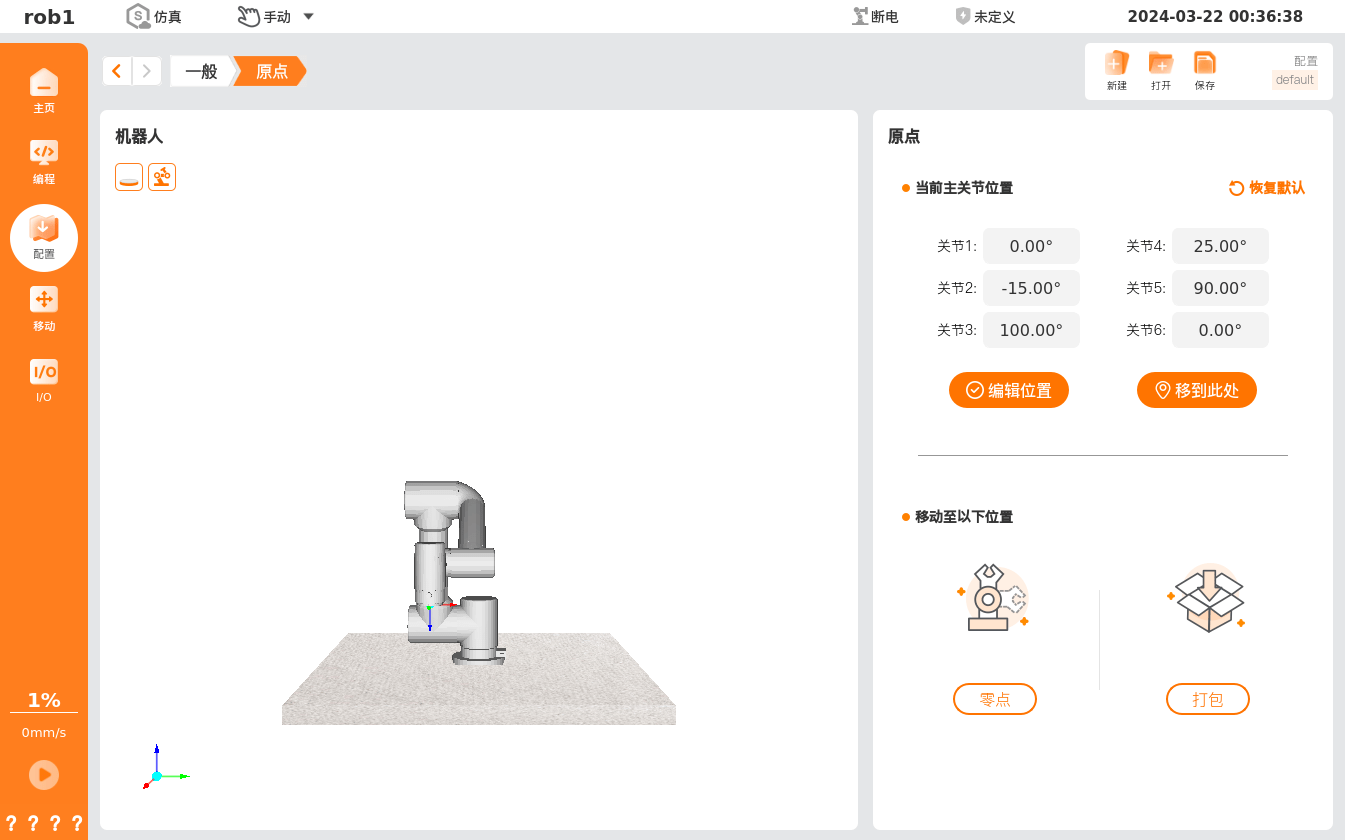
- 编辑位置:编辑用户自定义原点位姿。单击【编辑位置】按钮进入【移动】界面,移动机器人设置位姿,单击【确定】保存并返回。
- 移到此处:快速移动机器人到原点位姿。单击【移到此处】快速进入【移动】界面,关节控制框中橙色数字显示当前原点位姿的各关节参数,长按【原点】或【自动】按钮移动机器人到原点位姿,单击【确定】或【取消】返回。
- 恢复默认:清除用户自定义的原点位姿,恢复默认的原点位姿。
- 零点:快速移动机器人到零点位姿。
- 打包:快速移动机器人到打包位姿。打包位姿是机器人打包运送时使用的位姿。
变量
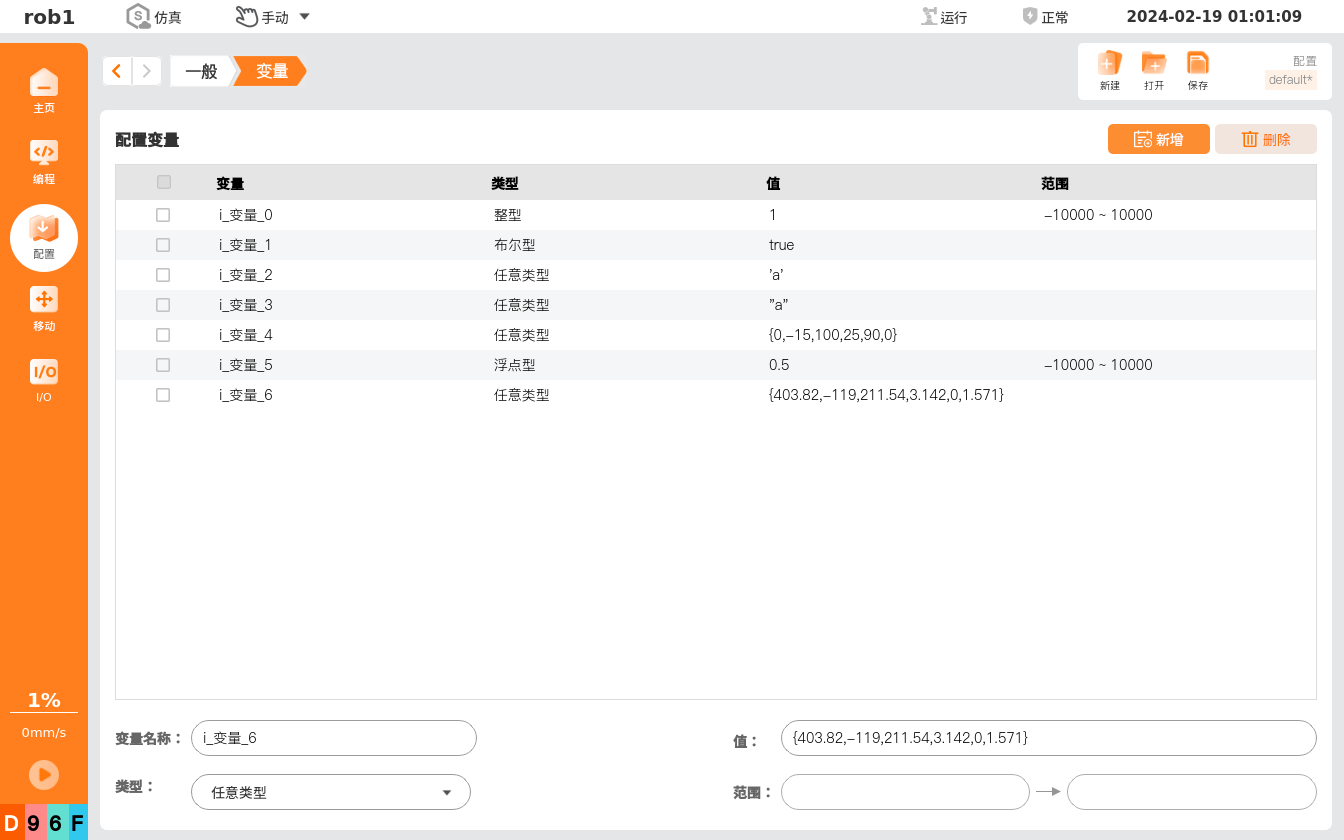
在该界面创建的变量称为 “配置变量”,用法与程序变量类似,同样分为 bool、int、float、string、pose 五种类型,具体变量类型定义请参见 “4.1.3 变量”。配置变量与程序变量的区别是:配置变量的名称和值储存在安装配置文件里,用户可以在多个程序中使用相同的变量。
【变量】界面可创建配置变量,并设置配置变量的初始值,单击配置管理工具栏的【保存】即可保存设置。程序运行过程中,该界面可实时更新配置变量的状态。
变量种类
- 程序变量:该变量仅适用于正在运行的程序,且变量值在程序停止后即丢失,属于常规程序变量,具体请参见 “4.3.6 赋值”。
- 配置变量:该变量可以用于多个程序,且变量名和变量值在机器人安装期间持续存在,属于保持型变量,具体请参见 “5.1.7 变量”。
- 脚本变量:该变量来自脚本文件,可被赋予不同的变量类型。脚本变量不出现在【编程】界面或【配置】界面中。机器人程序使用脚本变量来存储有关路点的信息。
以系统是否保存变量值、变量是否可应用于多个程序为分类标准,变量可以分为以下两种类型:
- 保持型变量:这些变量可以用于多个程序,且变量名和变量值在机器人安装期间持续存在。保持型变量在 AUBO SCOPE 软件或者控制器重启后会保持它们的值,如配置变量。
- 常规程序变量:这些变量仅适用于运行程序,且变量值在程序停止后即丢失,如程序变量。
数据类型
布尔型(Bool):布尔型变量,其变量值为 true/false。
整型(Integer):整型变量,其变量值为整数。
浮点型(Float):浮点型变量,其变量值为浮点数值。
字符串型(String):字符串型变量,其变量值为字符串类型值,需使用单引号
'或双引号"包裹。位置型(Pose):位置型变量,其变量值为机器人路点信息,包含 6 位参数,分两种情况:
- 在直线运动下,位置型变量的前 3 位为位置参数,单位为 mm,后 3 位为姿态参数,单位为 rad。
- 在关节运动下,位置型变量的 6 位参数分别为六个关节的角度,单位为弧度。
记录
【记录】界面可以存储一段时间内机器人运动的轨迹,存储的轨迹可以添加在程序里。
- 仿真模型:仿真机器人状态。
- 轨迹:新建/编辑/保存/删除轨迹。
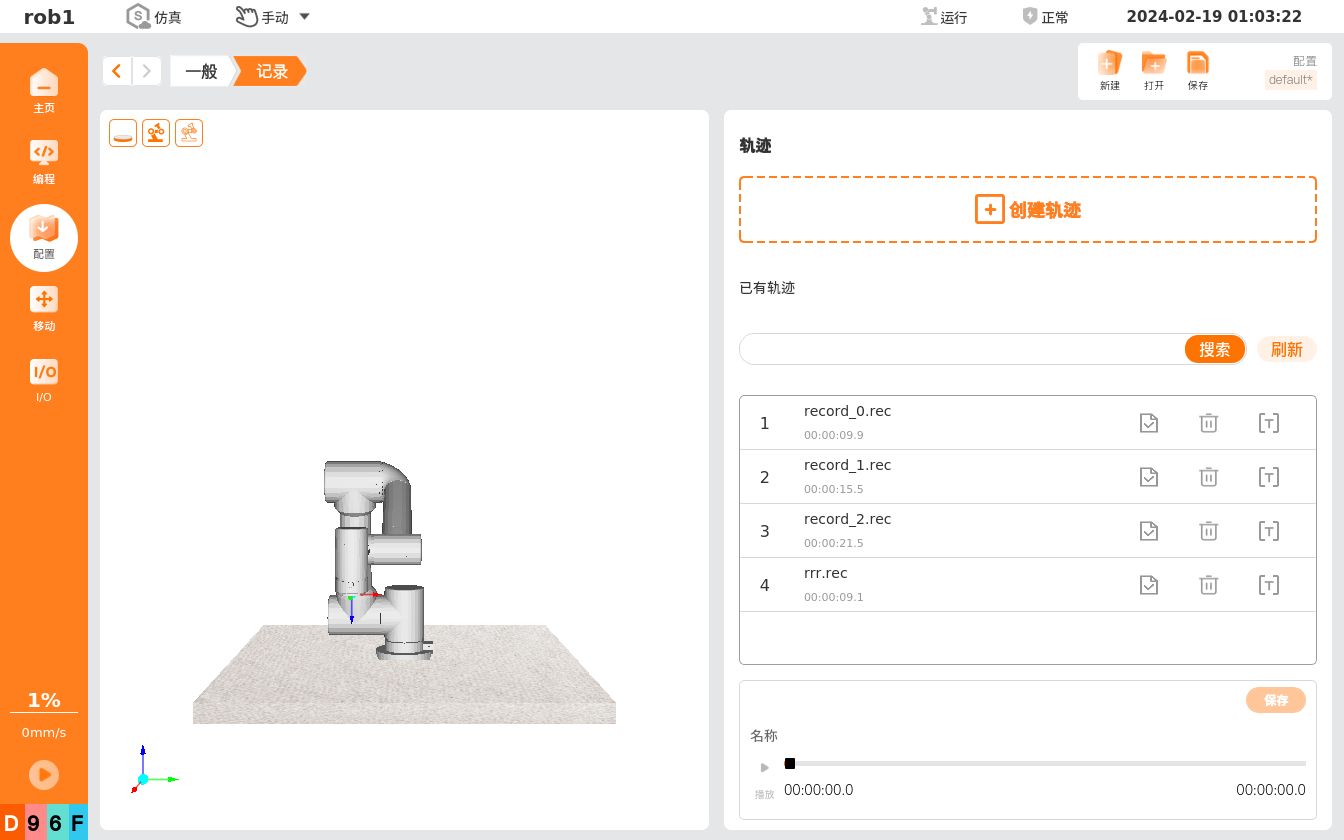
- 创建轨迹:单击【创建轨迹】按钮进入【移动】界面,通过位置/姿态控制按钮操控机器人,系统开始记录机器人的运行轨迹。运行结束后,单击【确定】,编辑轨迹名称保存轨迹。
- 搜索:通过轨迹名称搜索轨迹。
- 刷新:刷新轨迹列表。
 加载:加载轨迹。
加载:加载轨迹。 重命名:重命名轨迹文件。
重命名:重命名轨迹文件。.png) 删除:删除轨迹。
删除:删除轨迹。 播放:播放当前加载的轨迹。单击【播放】 后,进入【移动】界面,将机器人移动至初始位置,单击【确定】开始播放轨迹,【播放】 会变为【暂停】
播放:播放当前加载的轨迹。单击【播放】 后,进入【移动】界面,将机器人移动至初始位置,单击【确定】开始播放轨迹,【播放】 会变为【暂停】 。
。
新建一段轨迹
单击【创建轨迹】进入【移动】界面,单击
 开始记录,通过位置/姿态控制按钮操控机器人,系统会记录机器人的运行轨迹和时间,单击
开始记录,通过位置/姿态控制按钮操控机器人,系统会记录机器人的运行轨迹和时间,单击  退出【移动】界面。记录完成后,单击
退出【移动】界面。记录完成后,单击  会弹窗提示给轨迹文件命名,单击【保存】返回【记录】界面。
会弹窗提示给轨迹文件命名,单击【保存】返回【记录】界面。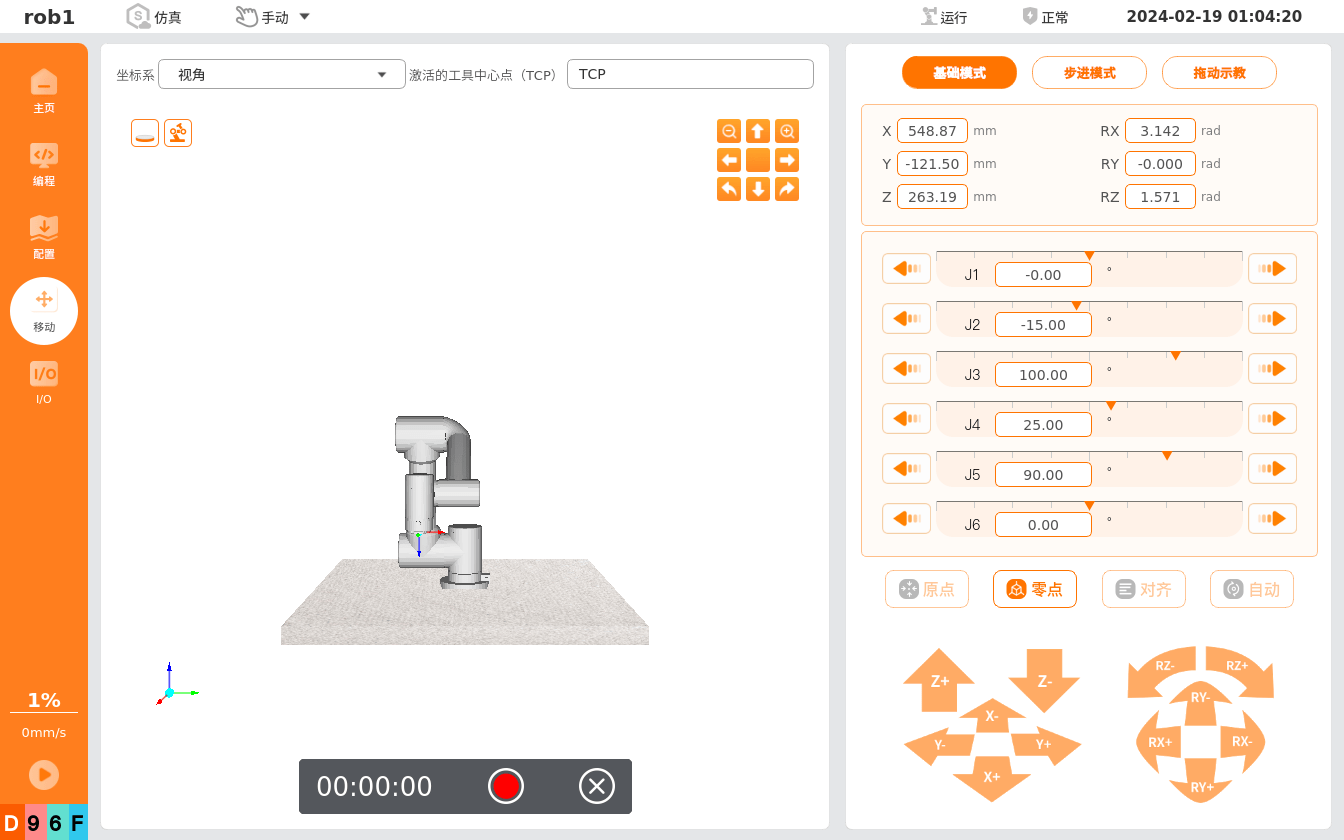
单击
可对记录的轨迹重命名。在轨迹列表中选择已保存的轨迹文件,单击【加载】
将轨迹加载到播放器中。
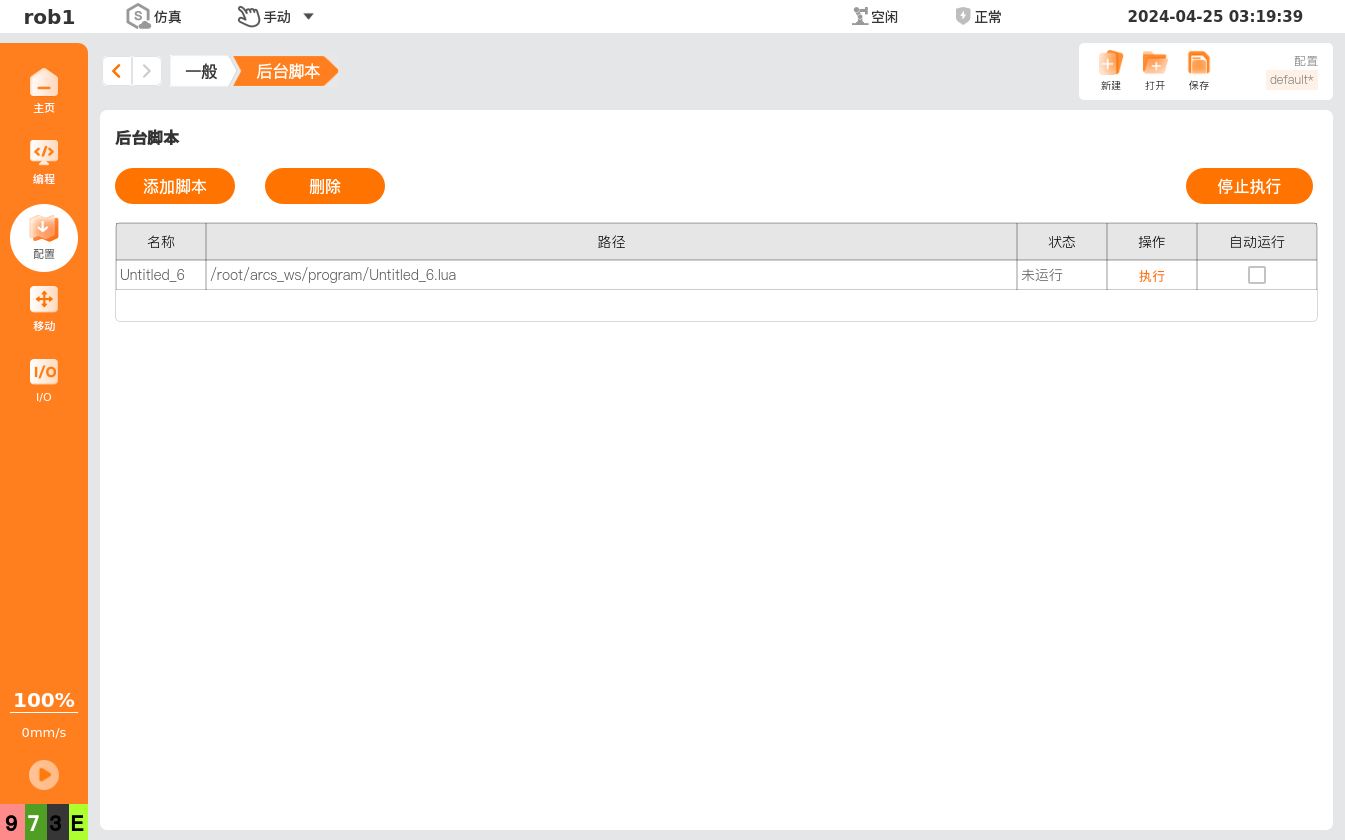
后台脚本
【后台脚本】可以设置多个后台运行的脚本,用户可以根据需求进行设置。
注意
在【后台脚本】中添加的脚本不可包含机器人运动指令。
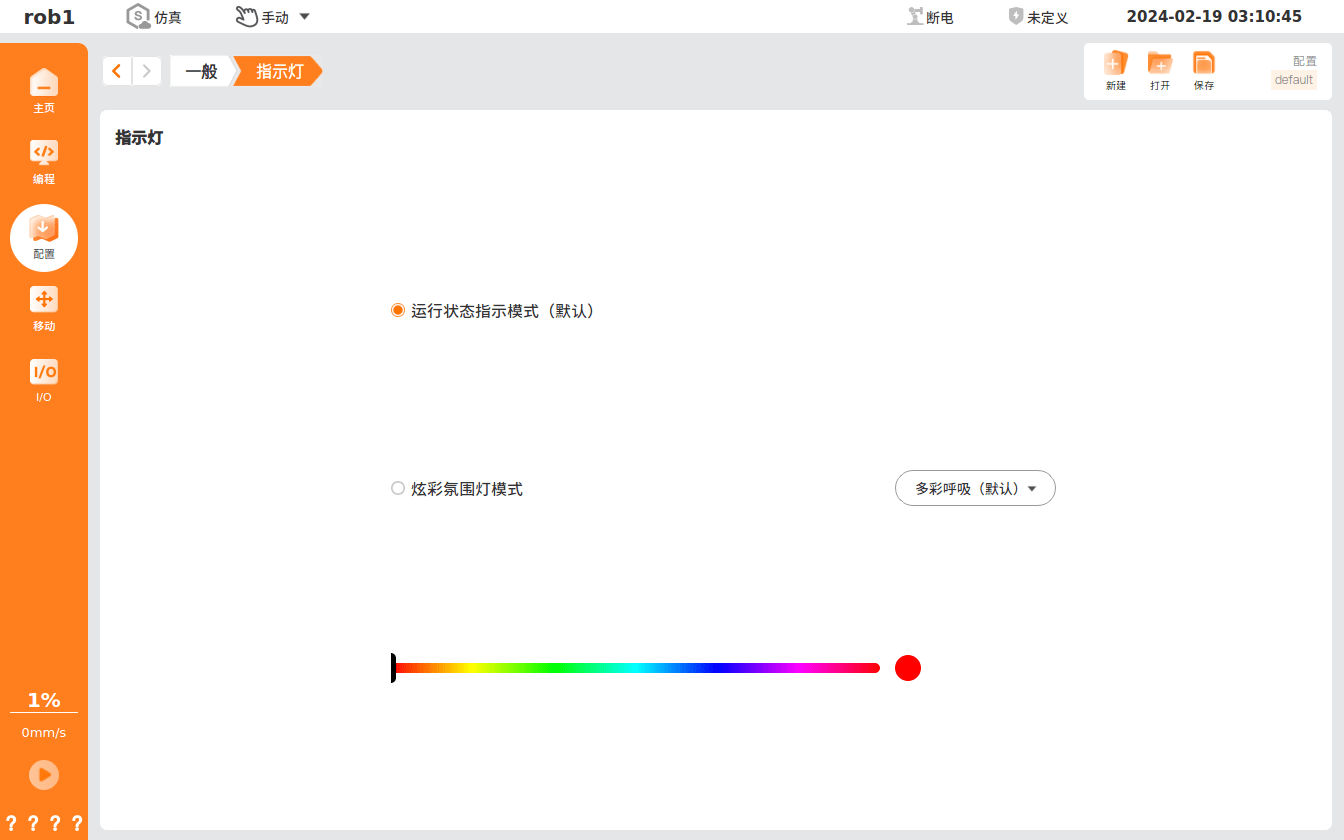
指示灯*
【指示灯】可以设置机器人指示灯模式,该功能仅部分型号机械臂支持,具体请参见硬件用户手册。
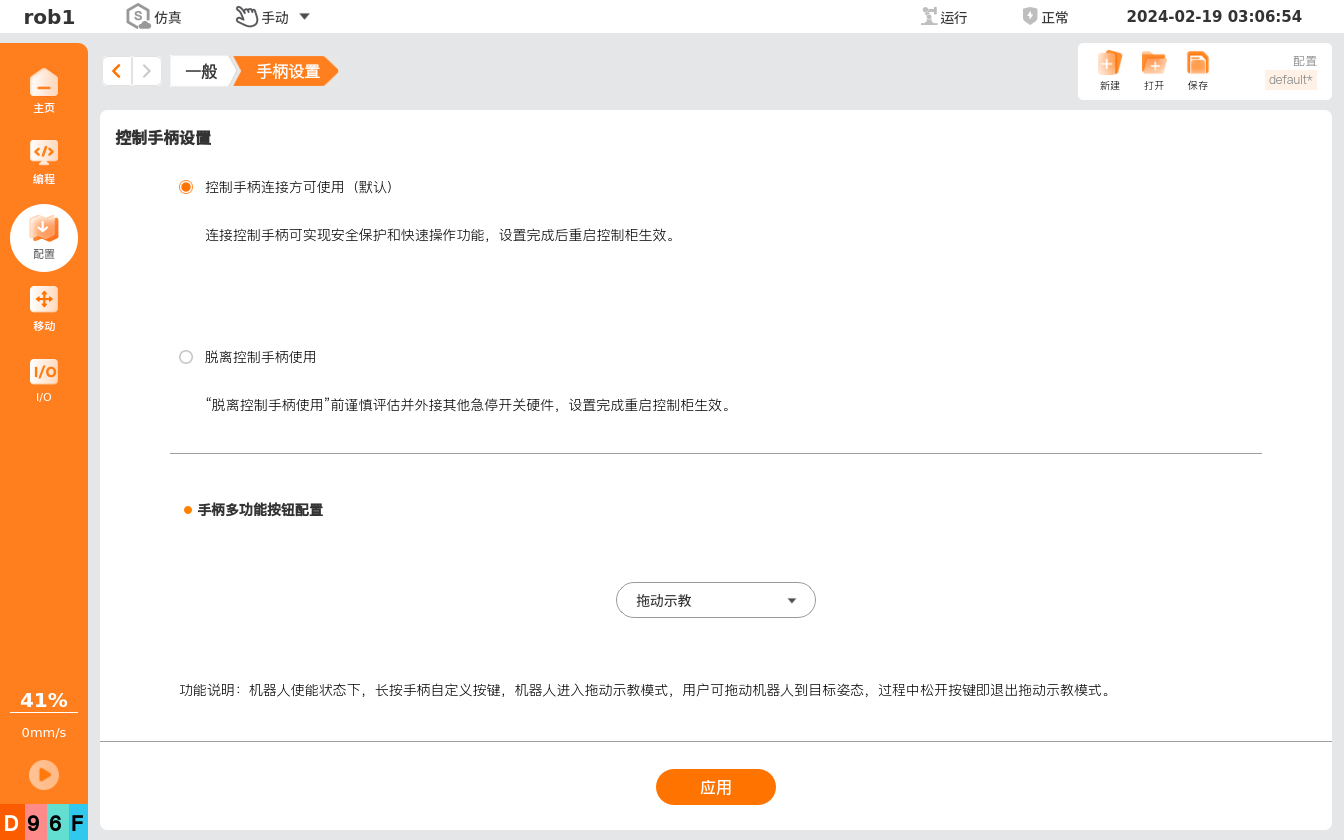
手柄控制*
【手柄设置】可设置与产品配套的手柄的控制方式,也可对手柄上的自定义按键进行功能配置。该功能仅部分型号控制器支持,具体请参见硬件用户手册。

提示
手柄完成设置后,单击【应用】仅使设置临时生效。如需重启不丢失相关设置,请单击【保存】保存当前的安装配置文件。