Appearance
安装配置
启动
【启动】可设置默认程序与自动初始化。默认程序是控制器开机后自动加载的程序,系统在进入运行程序且未加载任何程序时,将自动加载默认程序。自动初始化,即如果机器人断电,当机器人接收到信号时,机器人进行初始化使机器人恢复可运行状态。
警告
- 当自动加载、自动启动、自动初始化被启用时,只要输入信号与选定的信号电平相匹配,机器人在控制器上电后立即运行程序。例如:在低电平情况下,不需要边沿转换到选定的信号电平。
- 信号电平设置为低电平时请小心。输入信号默认为低电平,使程序自动运行而不受外部信号的触发。
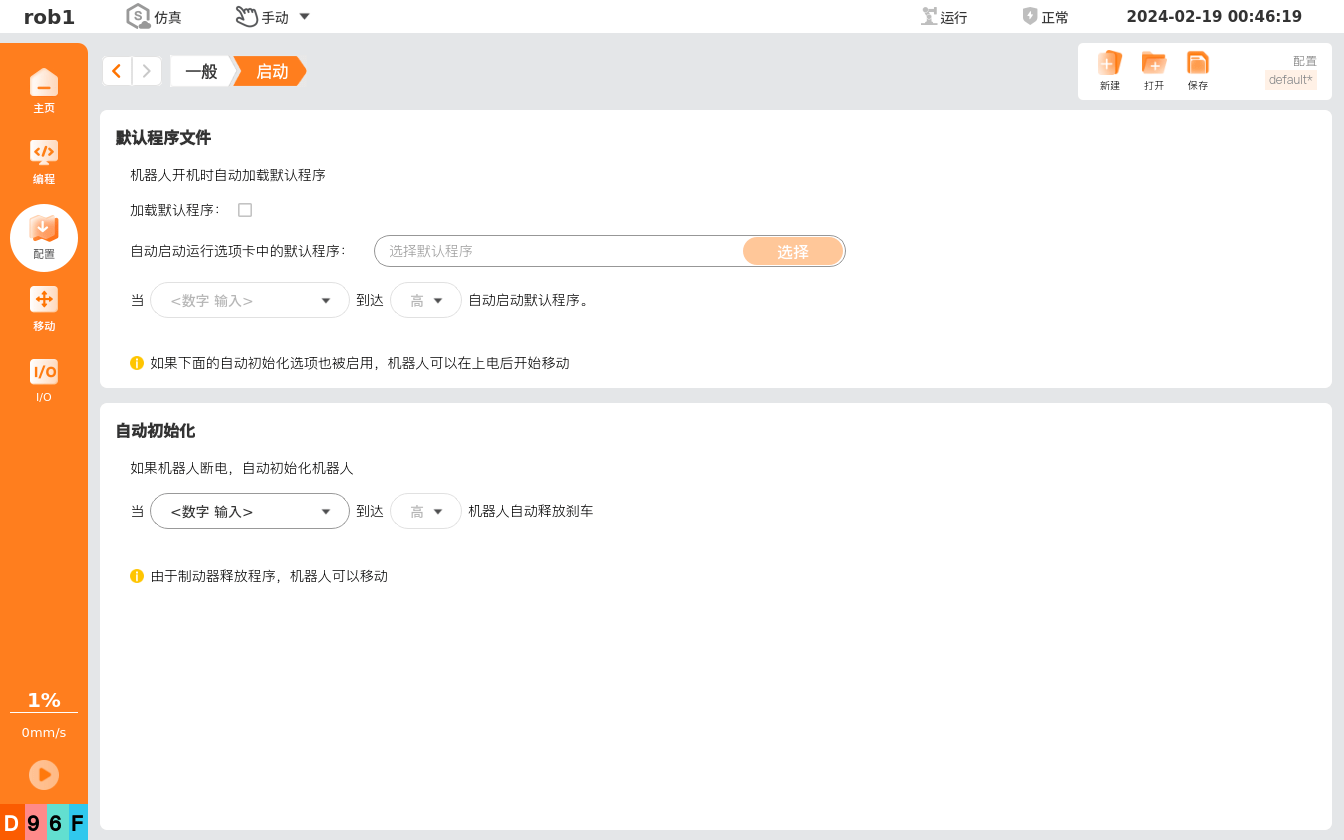
加载默认程序:勾选后,系统会在启动时加载用户设置的默认程序,否则机器人将加载系统的默认程序。
自动启动运行选项卡中的默认程序:选择默认程序。
默认程序文件-当 I/O 到达【高/低】自动启动默认程序:设置运行默认程序的信号,当 I/O 收到对应信号时,系统自动运行默认程序。若没有设置 I/O 信号,系统将不会自动运行默认程序。
自动初始化-当 I/O 到达【高/低】机器人自动释放刹车:设置机器人自动初始化的信号。若没有设置 I/O,机器人断电后将不会自动进行初始化。
离开运行程序或单击示教软件中的停止按钮将禁用自动启动功能,直到再次按下运行按钮为止。
工具中心点
工具中心点,英文名称为 “Tool Center Point”,可以简写为 “TCP”。由于机器人末端固定的工具的形状、大小不同,比如焊枪、夹爪等,所以需要选择一个点来代表整个工具,并以该点作为工具坐标系(Tool Coordinate System)的原点。当移动机器人到空间某一点时,本质是让工具中心点移动到该点,因此可以说机器人的轨迹运动是工具中心点(TCP)的运动。
工具坐标系原点的标定通常采用四点标定法来标定位置,即保持末端工具位置不变,改变机器人关节角,得到四个标定位置来确定工具坐标系。
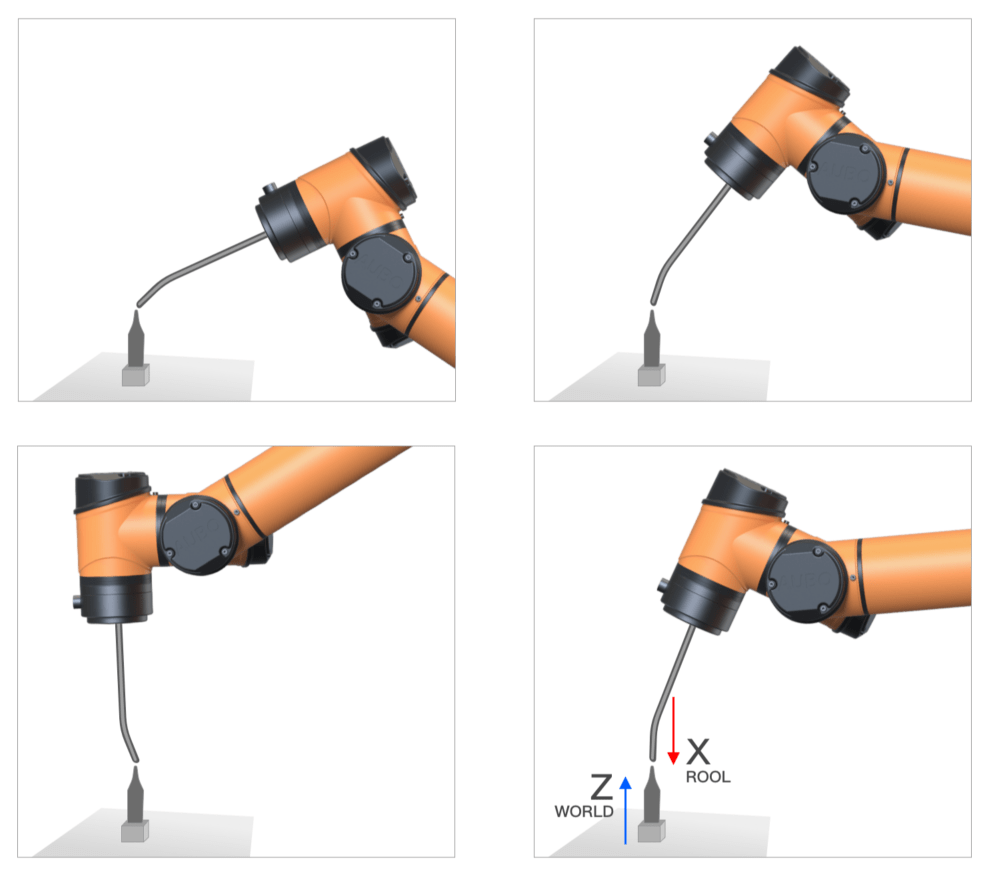
工具坐标系方向则使用目标坐标系以及平面上一点法来标定。

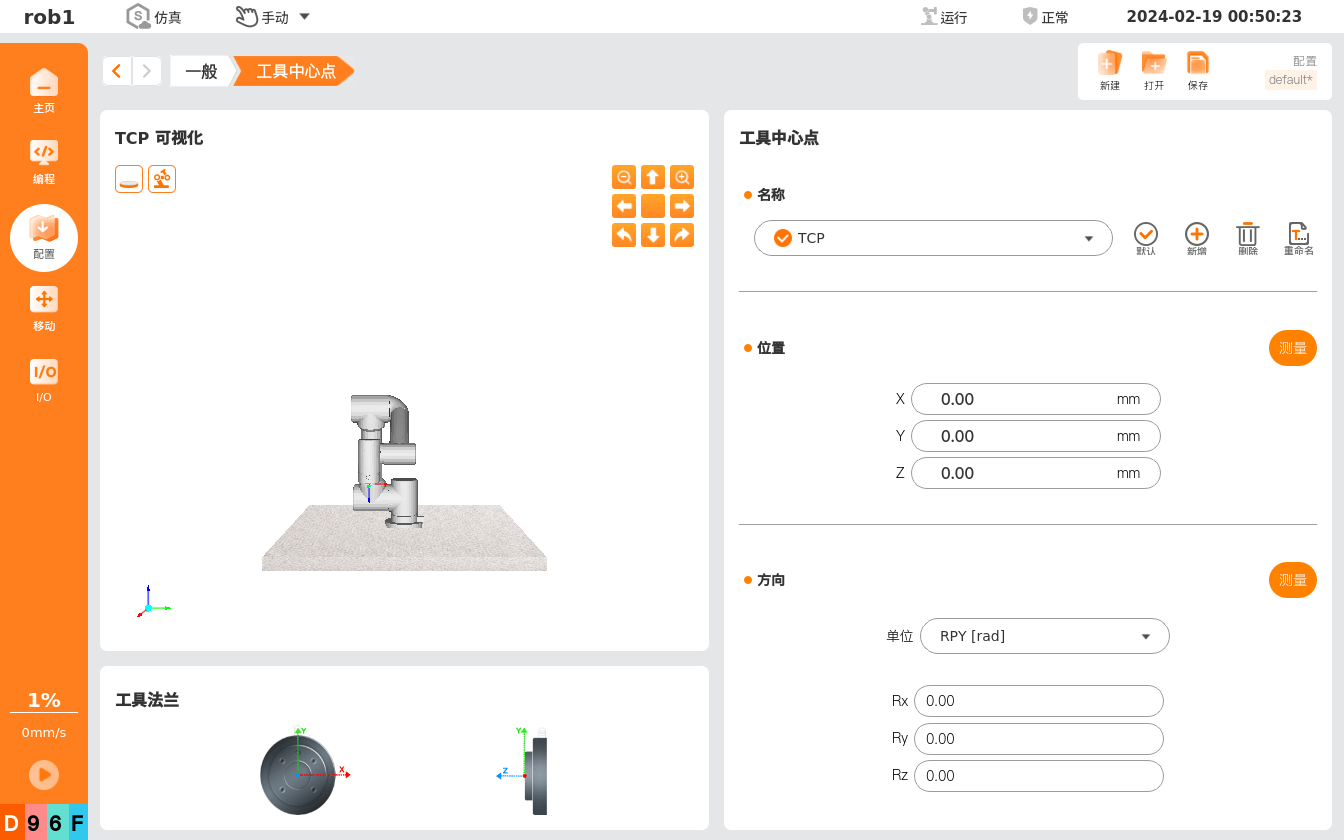
【工具中心点】界面可以设置工具坐标系,每个 TCP 都包含相对于工具法兰中心而设定的平移和旋转参数:X、Y 和 Z 坐标指定 TCP 位置;RX、RY、RZ 坐标框定 TCP 方向。当所有值(包括方向)均为零时,TCP 与工具法兰的中心点重合。
- TCP 可视化: 仿真当前设置下的 TCP。
- 工具中心点: 设置与管理 TCP。
- 工具法兰: 显示工具法兰的中心点。
 当前默认:当前默认的 TCP。
当前默认:当前默认的 TCP。 默认:设置为默认 TCP。
默认:设置为默认 TCP。 新增:新增 TCP。
新增:新增 TCP。 重命名:重命名选择的 TCP。
重命名:重命名选择的 TCP。 删除:删除选择的 TCP。
删除:删除选择的 TCP。- 位置-测量:TCP 位置辨识向导,用户跟随向导操作使机器人自动计算 TCP 位置。
- 方向-测量:TCP 方向辨识向导,用户跟随向导操作使机器人自动计算 TCP 方向。
设置 TCP
- 方法一:手动输入位置 X、Y、Z 和方向 Rx、Ry、Rz 的值。
- 方法二:使用 TCP 位置/方向辨识向导来确定 TCP 的位置和方向。
负载
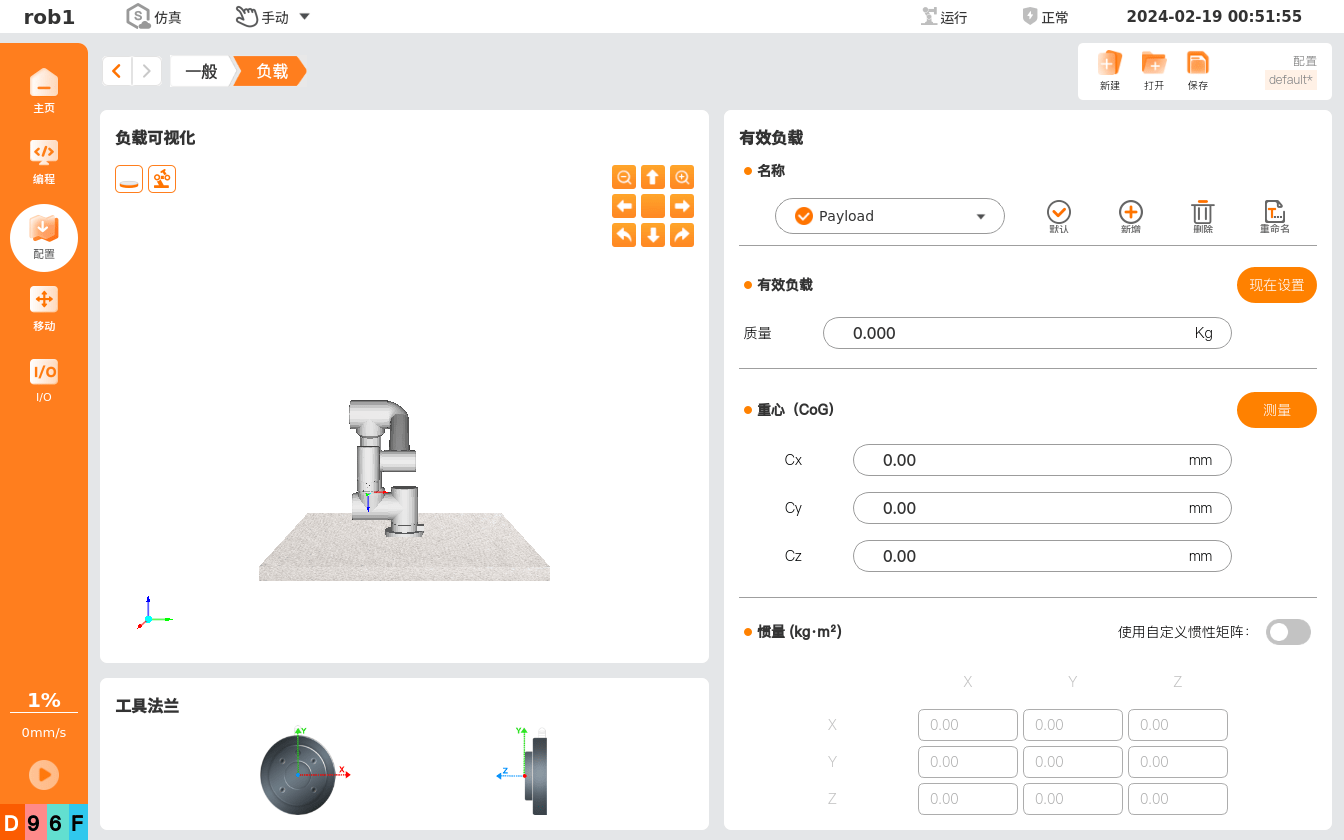
有效负载,包括末端负载质量和重心。例如当机器人取料卸料时,机器人末端的载荷以及重心会发生变化。因此,为了更好的发挥机器人的性能,需对末端载荷、重心进行设置。惯量,是在坐标系中指定的,其原点位于有效负载的重心(CoG)处,且轴与工具法兰轴对齐。可根据具有用户指定质量的球的惯量计算默认惯量,球的质量密度为 1 g/cm3。
【负载】界面可以定义或切换有效负载。用户可以定义多个有效负载,且必须至少定义一个有效负载。每个有效负载须包含负载质量、重心等参数(CoG),才能使机器人发挥最佳性能。
提示
- 设置完成后,推荐依次单击【现在设置】、【默认】、【保存】按钮,保证移动示教和编程时均使用当前设置的有效负载参数。
- 编辑程序中使用确认为【默认】的有效负载参数。
- 移动示教时使用确认为【现在设置】的有效负载参数。
- 关机重启后使用安装配置文件中确认为【默认】的有效负载参数。
- 负载可视化:仿真当前设置下机器人的状态。
- 有效负载:设置有效负载、重心等。
- 工具法兰:显示工具法兰的中心点。
- 当前默认:当前默认有效负载。
- 默认:设置为默认有效负载。
- 新增:新增有效负载。
- 重命名:重命名当前选择的有效负载。
- 删除:删除选择的有效负载。
- 现在设置:立即生效当前设置的有效负载。
- 测量:有效负载辨识向导,用户跟随向导操作使机器人自动计算有效负载和重心 (CoG)。
设置有效负载
- 方法一:手动输入有效负载和重心的值。
- 方法二:使用有效负载辨识向导来确定有效负载和重心。
坐标系
用户可以通过坐标系来代表不同的物体或边界。例如在机器人运行过程中,可能需要相对于某个对象移动,这个对象可以是机器人周围的桌子、工件、坯料、其他机器或边界,此时使用自定义坐标系来表示这些对象,并对自定义坐标系进行命名以便使用。
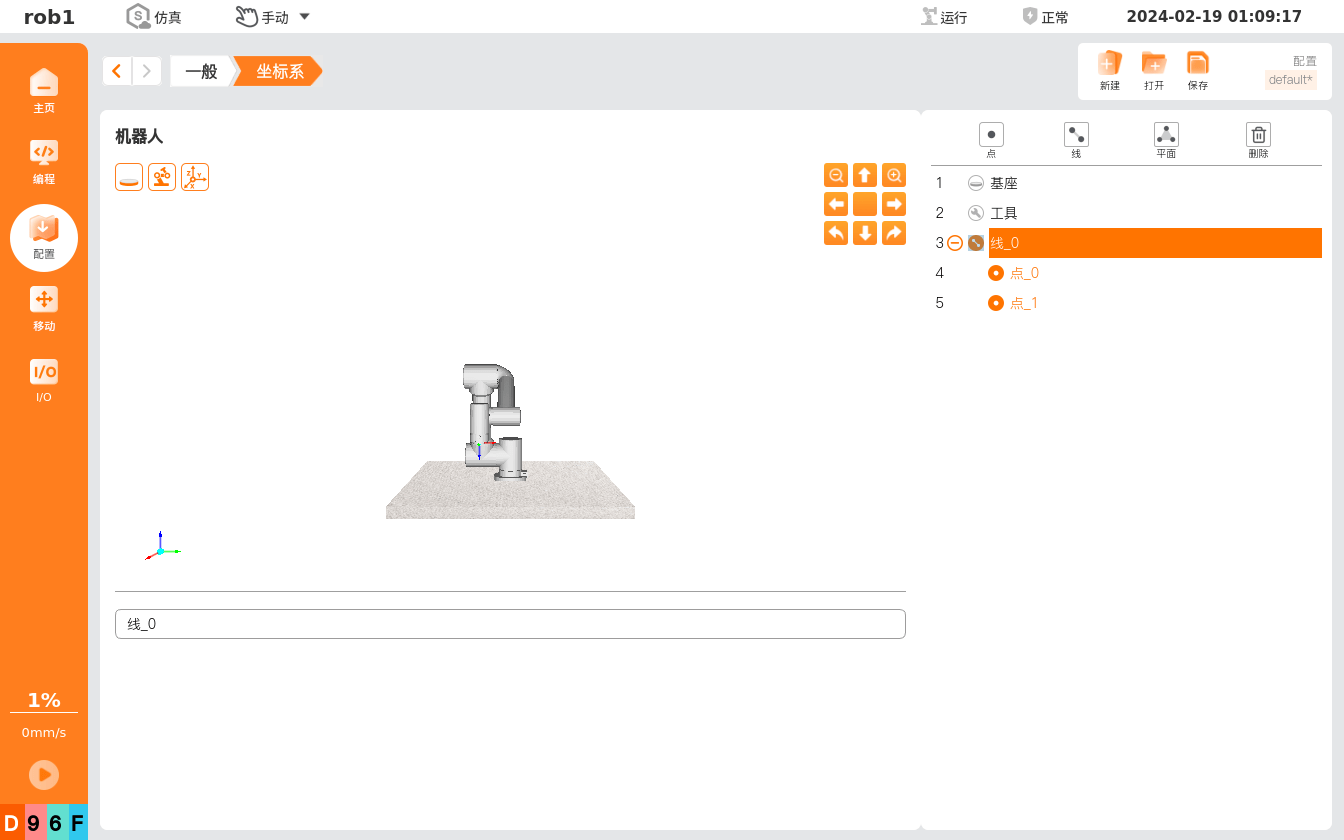
【坐标系】界面提供通过点、线、面三种方式来构建新的坐标系,新的坐标系通过 TCP 的位置进行定位,用户选择构建新坐标系的方式后,通过移动 TCP 到目标位姿来示教坐标系位置。
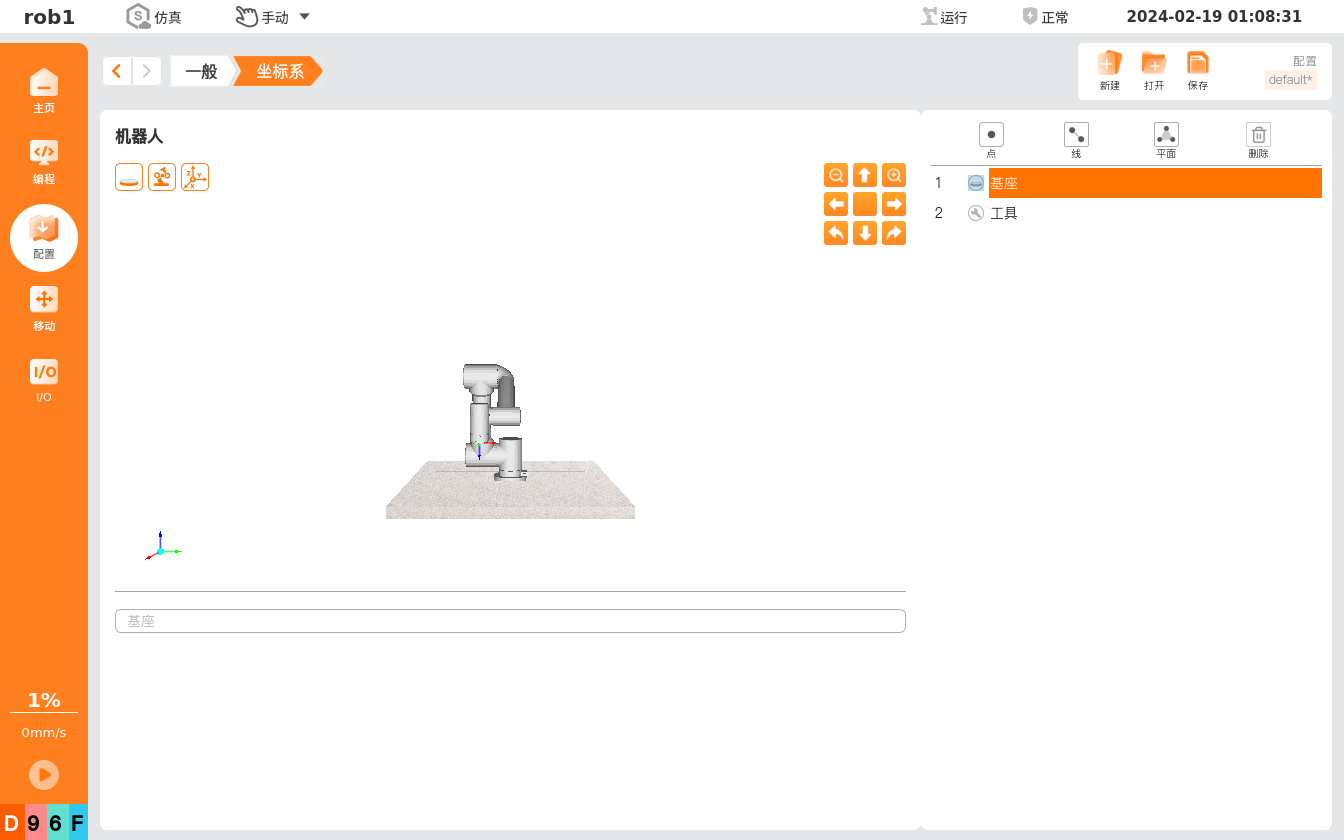
 点:通过点构建新坐标系。
点:通过点构建新坐标系。 线:通过线构建新坐标系。
线:通过线构建新坐标系。 面:通过面构建新坐标系。
面:通过面构建新坐标系。_3@2x.png) 删除:删除坐标系。
删除:删除坐标系。
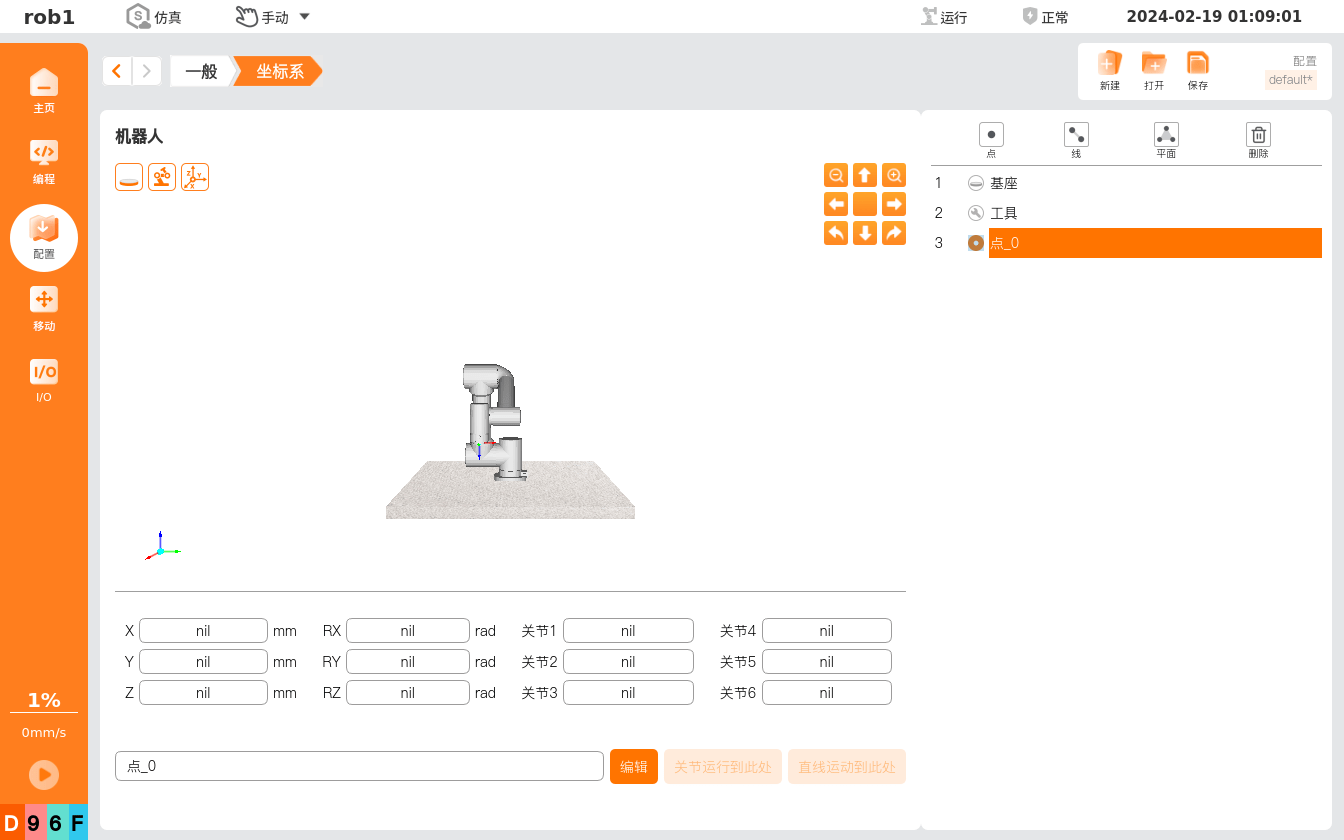
通过点构建新坐标系
通过点构建新坐标系,即通过 TCP 示教新坐标系原点的位置,坐标系轴的方向与 TCP 方向相同。该方式通常用来定义机器人的安全边界或全局主配置。
单击【点】
,创建新的坐标系。单击下方输入框,重命名新坐标系名称。单击【编辑】,通过位置/姿态控制按钮操控机器人,完成设置,单击【确定】保存数据返回【坐标系】界面。仿真模型下方显示设置该点时使用的位姿信息。
单击【关节运动到此处】或【直线运动到此处】进入【移动】界面,长按【自动】可使机器人回到构建当前坐标系时使用的位姿。
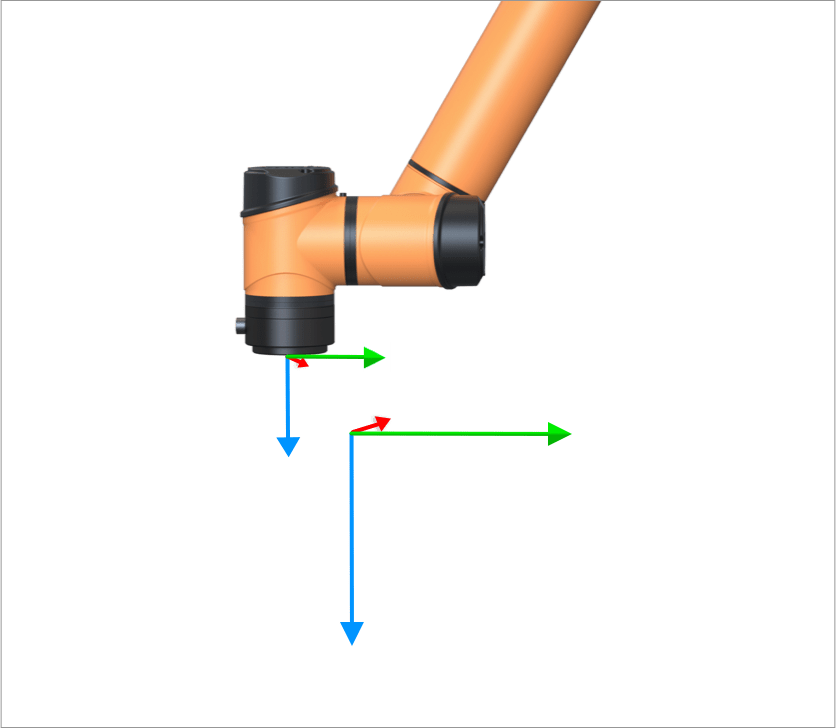
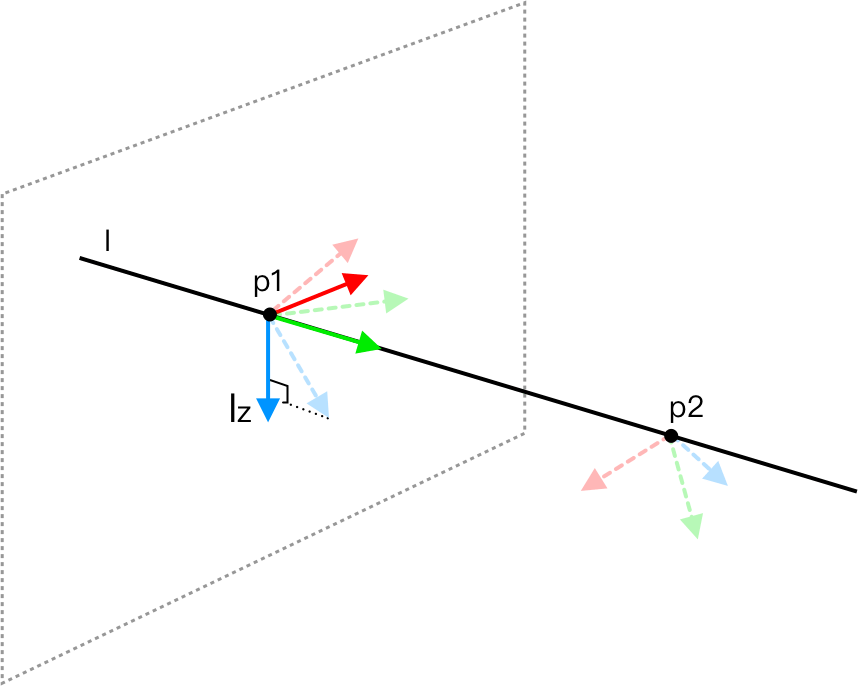
通过线构建新坐标系
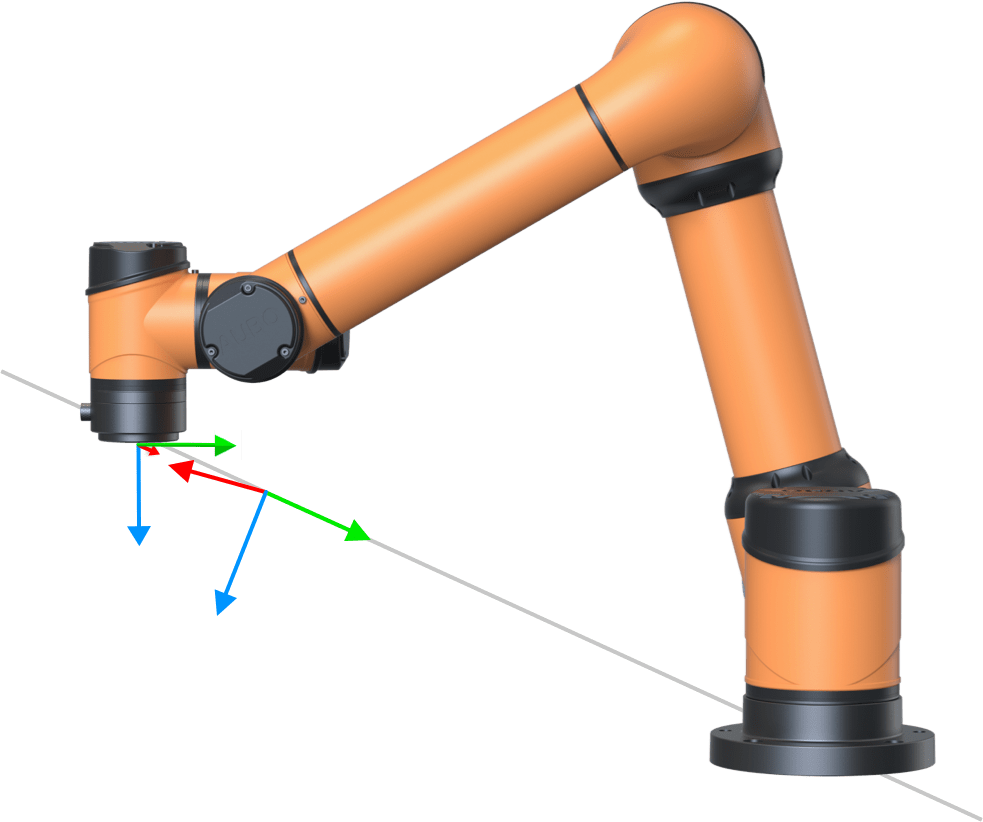
通过线构建新坐标系,其坐标系原点由第一点定义;Y 轴为第一点指向第二点的轴;Z 轴为第一点的 Z 轴在垂直于直线的平面上的投影。该方式定义了机器人需要遵循的线。
单击【线】
,创建新的坐标系。单击输入框,重命名新的坐标系。
单击
 展开列表,依次选择路点,单击【编辑】,通过位置/姿态控制按钮操控机器人,完成设置,单击【确定】保存数据返回【坐标系】界面。
展开列表,依次选择路点,单击【编辑】,通过位置/姿态控制按钮操控机器人,完成设置,单击【确定】保存数据返回【坐标系】界面。单击【关节运动到此处】或【直线运动到此处】进入【移动】界面,长按【自动】可使机器人回到构建当前坐标系时使用的位姿。
通过面构建新坐标系
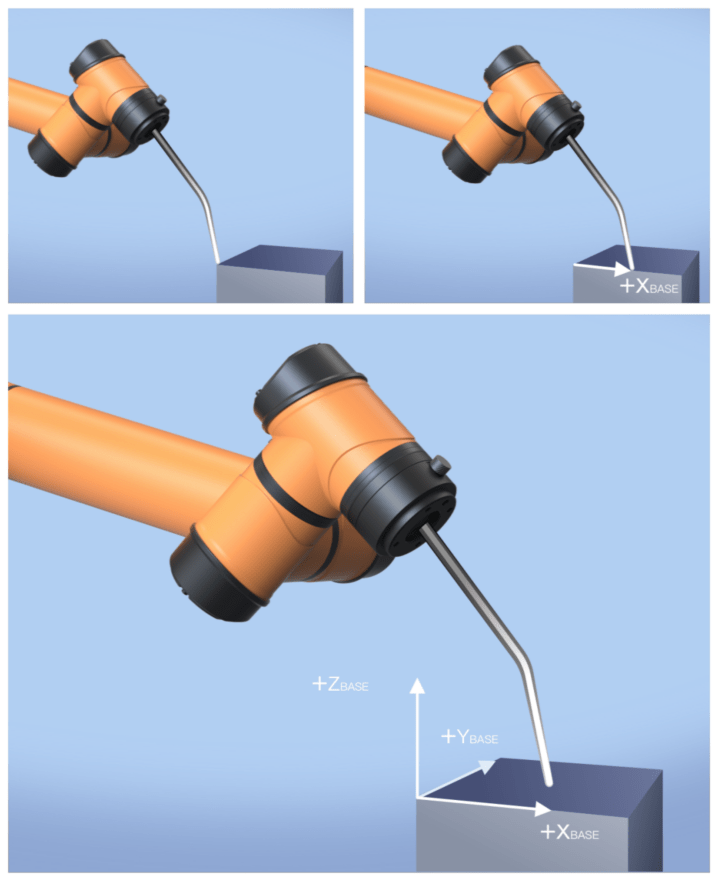
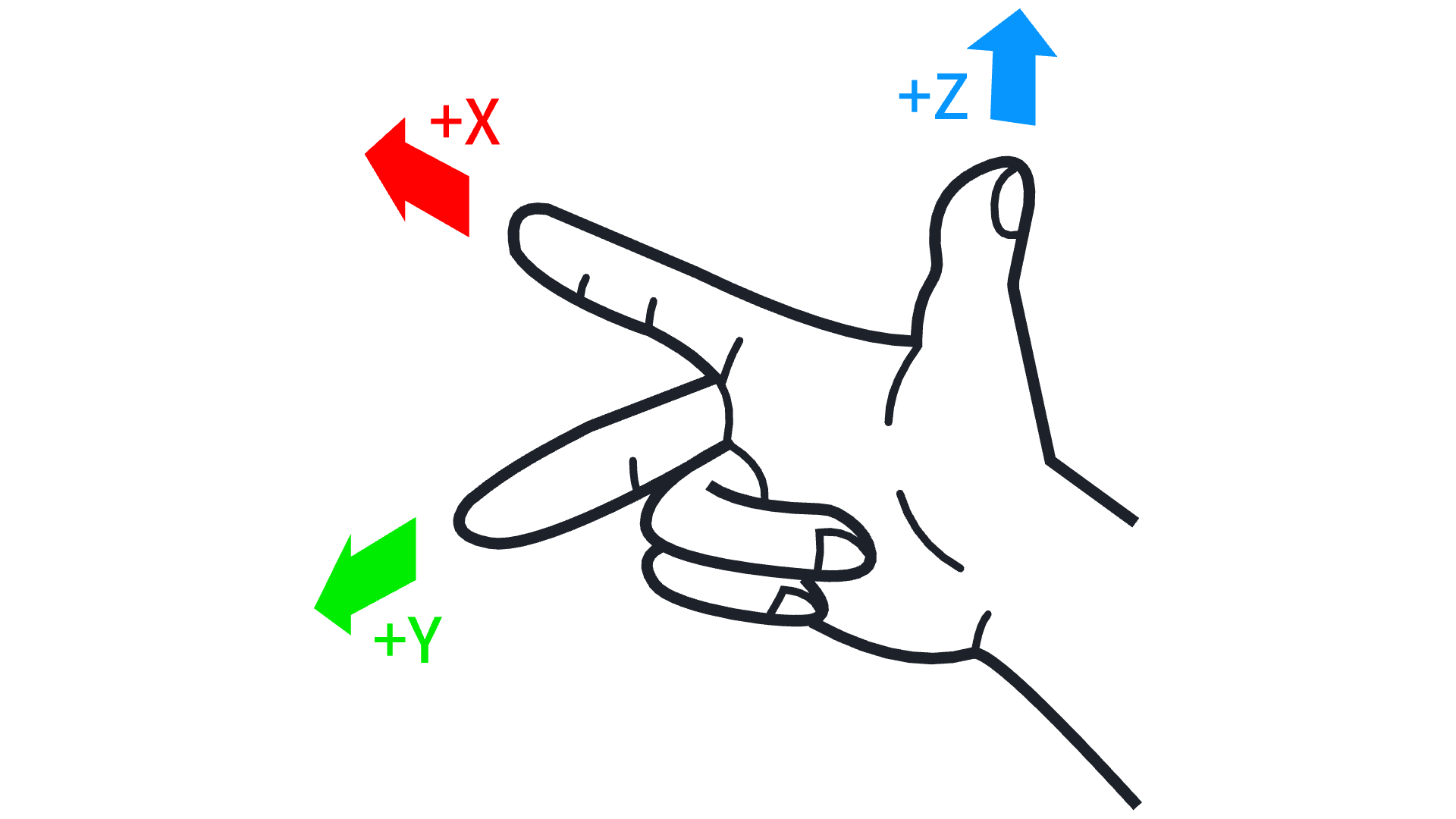
通过面构建新坐标系,又称三点标定法标定坐标系,其坐标系原点由第一点定义;X 轴为第一点指向第二点的轴;第三点落在 XY 平面上,Z 轴垂直于 XY 面,满足右手定则。该方式一般在需要高精度框架时选择使用,例如:机器人相对于桌子进行移动。
单击【面】
,创建新的坐标系。单击输入框,重命名新特征。
单击
展开列表,依次选择路点,单击【编辑】,通过位置/姿态控制按钮操控机器人,完成设置,单击【确定】保存数据返回【坐标系】界面。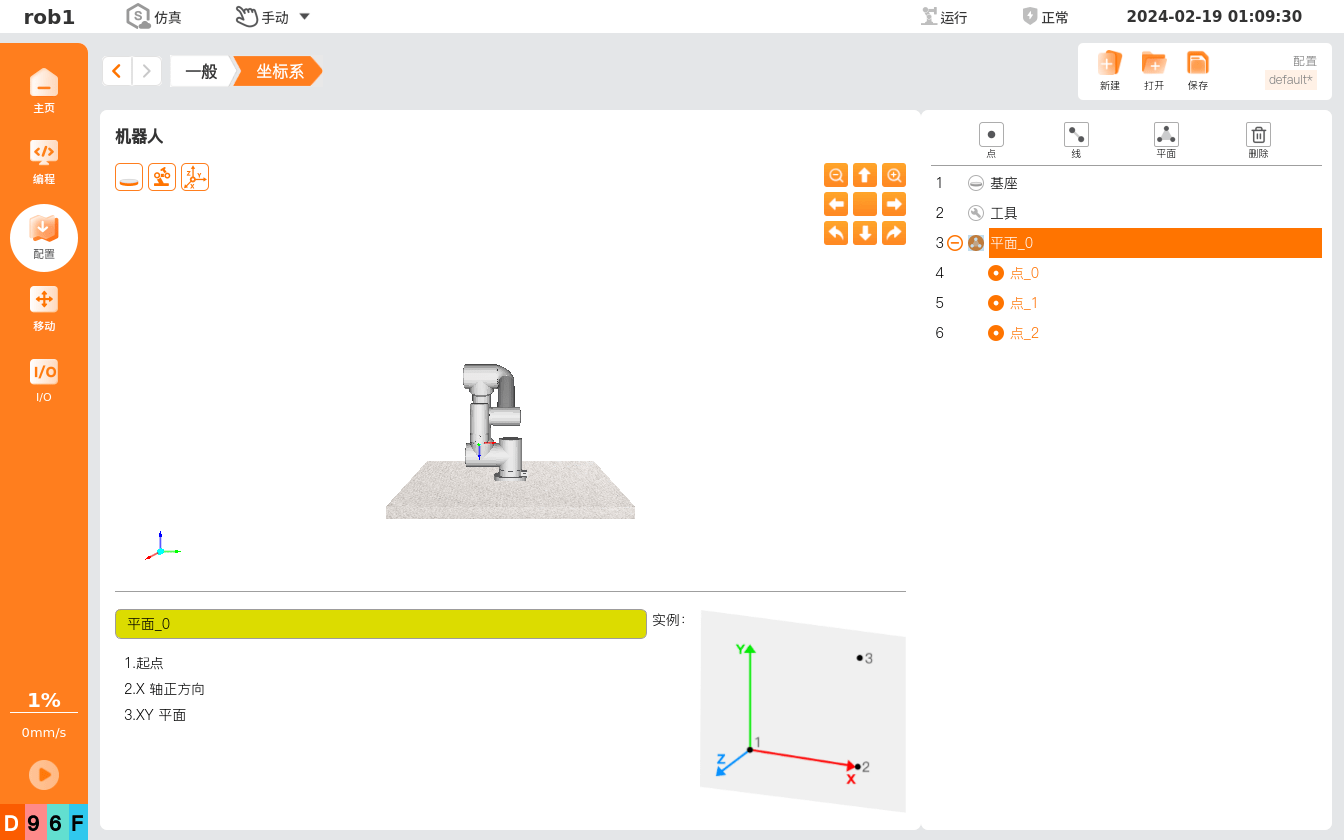
碰撞
AUBO 机器人提供外力过大保护功能,机器人能够感知外部施加的压力,并采取相应的措施来保护自身或防止对周围环境和人员造成伤害。
【碰撞】界面提供了碰撞等级、碰撞模式等功能设置,用户可以根据实际情况修改碰撞等级和碰撞后机器人的处理方式,确保机器人在使用过程中的安全性和可靠性。
该功能是特别为人机协同工作安全性而设定,要求机器人系统必须在正常运作范围内,且使用 AUBO 系列的控制器。如果使用者自己开发控制器,机器人将不具备以上功能。
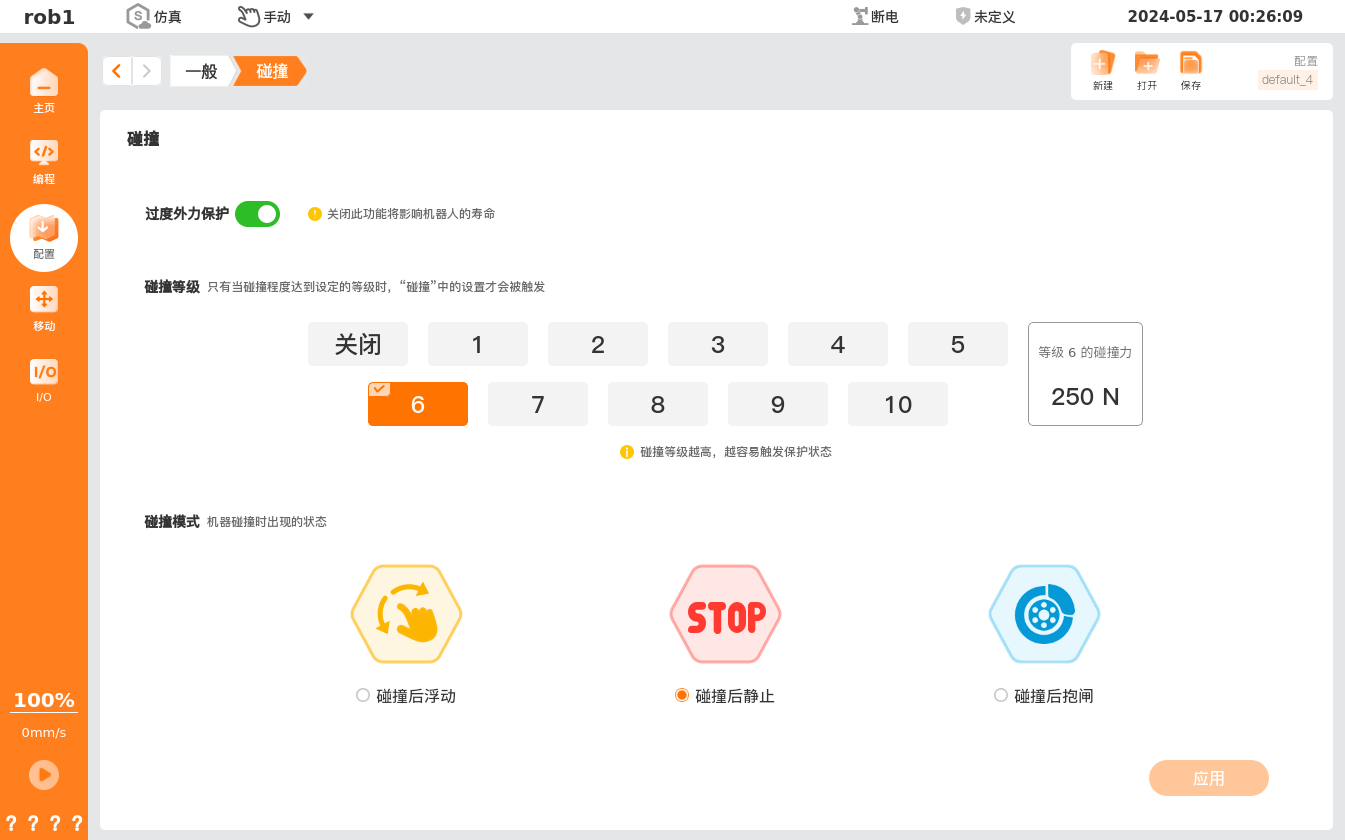
过度外力保护
开启:机器人在静止状态下,受到超过系统判定的安全外力时,机器人将进入拖动示教模式,避免损坏重要运动部件。
关闭:机器人在静止状态下受到较大外力可能会造成机器人关键执行部件的的损伤,影响机器人使用寿命。
如果 “碰撞模式” 设置为 “碰撞后静止”,机器人在运行工程时发生碰撞并停止后,如果机器人再次受到外力,机器人将不会发生移动。
碰撞等级
机器人触发碰撞事件的灵敏程度,共有 10 个安全等级,数值越小等级越高,触发碰撞事件所需的力越大。系统默认碰撞等级为 6。
碰撞模式
碰撞事件发生后,机器人的处理方式。
- 碰撞后浮动:碰撞发生后,机器人停机进入拖动示教模式,操作人员可以手动拖动机器人至任意安全位置。
- 碰撞后静止:碰撞发生后,机器人停机,保持静止不动。
- 碰撞后抱闸:碰撞发生后,机器人停机抱闸,保持静止不动(该功能仅适用于固件版本为 1.*.* 的机器人)。